

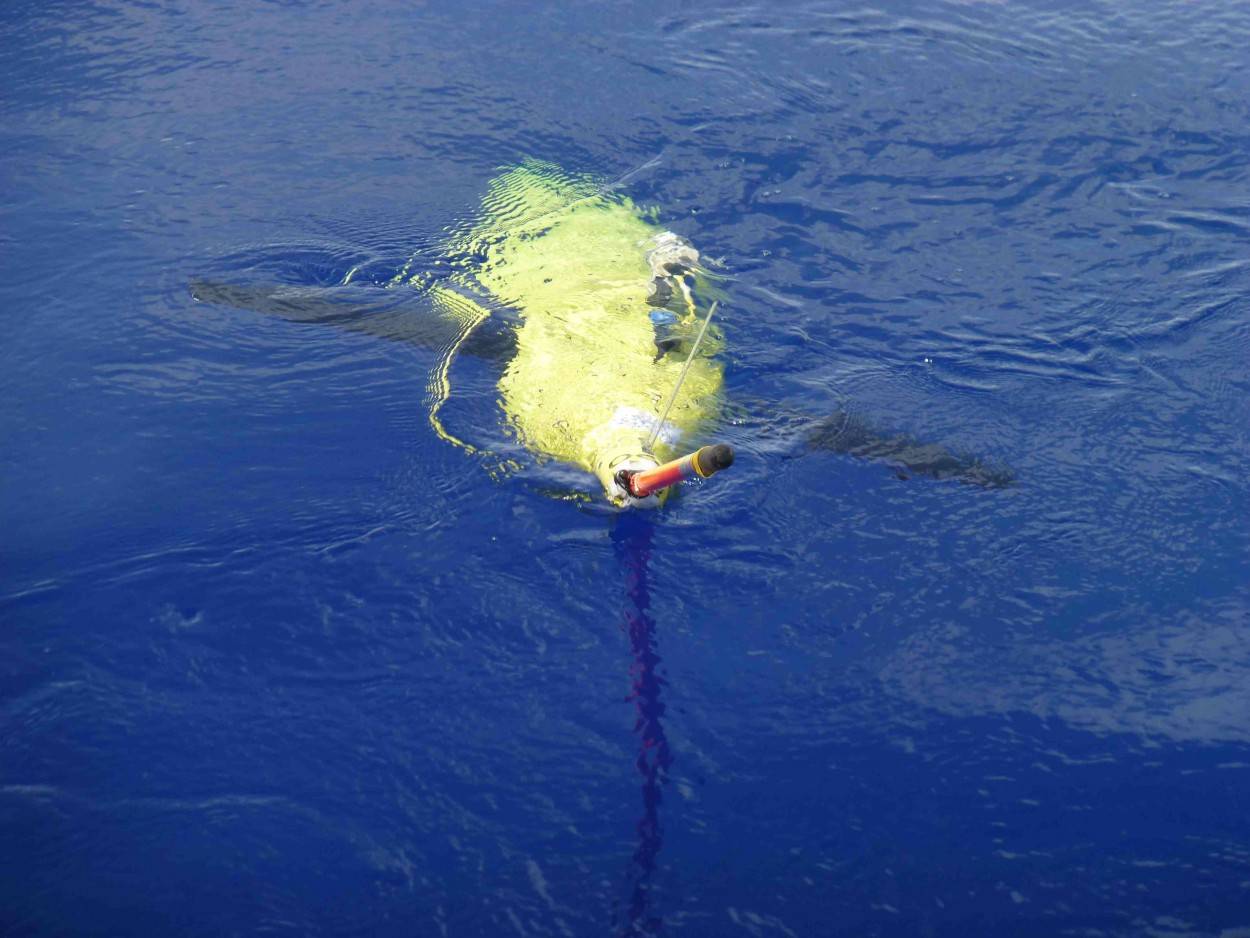
Трехметровый ромбовидный Wave Glider отчасти напоминает доску для серфинга, отчасти каяк. Он плавает на поверхности океана и использует энергию волн и солнца для своей гибридной системы энергопитания и движения, при этом во время долгих путешествий устройство собирает и обрабатывает данные
За длительную историю мореплавания человечество нашло несколько способов извлечения энергии из окружающей среды и восполнения ее скудных запасов на борту с целью увеличения дальности плавания и открытия новых земель, хотя порой и с трагичным исходом.
На протяжении тысячелетий жизненно важными технологиями мореходства оставались паруса, весла и мускульная сила и только относительно недавно на помощь пришел пар, появился двигатель внутреннего сгорания, а за ним и ядерная энергия, что в корне изменило природу мореплавания. Тем не менее, современные беспилотные подводные и надводные глайдеры (glider – англ., планер) используют соответственно изменение плавучести и энергию волн с тем, чтобы перемещаться на малых скоростях в течение многих месяцев. Это позволяет человечеству решать множество насущных задач, получая информацию и данные с помощью ранее недоступных инструментов. Хотя технологии приведения движения за счет энергии волн и изменения плавучести используются уже много лет, они до сих пор малоизвестны и довольно непривычны для широкой публики, поэтому стоит дать краткое описание принципов их работы прежде, чем приступать к изучению отдельных платформ и выполняемым ими задачам.
Плавучесть для движения
Поплавковый глайдер представляет собой автономный подводный аппарат (АПА), который перемещается под действием попеременного изменения остаточной плавучести с помощью так называемого модуля изменения остаточной плавучести - аналога рыбьего пузыря. Изменение плавучести заставляет аппарат подниматься или опускаться в водной толще, при этом вектор подъемной силы крыльев заставляет аппарат медленно и экономично (эмпирическое правило – пол-ватта на пол-узла [0,9 км/ч]) перемещаться по «пилообразной» траектории вперед. Хотя некоторые из них оборудованы гидродинамическими управляющими рулями, зачастую рулевое управление выполняется просто за счет перемещения тяжелого аккумуляторного отсека: с борта на борт, чтобы создать желаемый угол крена, и вперед и назад, чтобы изменить наклон аппарата в продольной плоскости.
Полезная нагрузка, как правило, включает датчики CTD (Conductivity, Temperature and Depth; соленость воды, температура и глубина), чьи выходные данные поступают в так называемые профили распространения звука SSP (Sound Speed Profile), представляющие собой графики, которые строят локальную скорость звука относительно глубины. Это позволяет получить очень ценную информацию для расчетов параметров гидролокаторов, используемых другими платформами борьбы с подводными лодками и минами. Подводные глайдеры, использующие подъемную силу поплавков, в основном ограничиваются системами связи с низкой скоростью передачи данных, включая акустические модемы и каналы спутниковой связи. Через регулярные интервалы они поднимаются к поверхности, чтобы с помощью своей антенны спутниковой связи загрузить данные для выполняемой задачи, служебные данные и получить новые инструкции.

Аппараты Wave Glider от Liquid Robotics готовы для развертывания. Эти надежные волновые глайдеры выполняют различные задачи, включая работу в качестве шлюза между подводными системами и остальным миром, используя для этого акустические модемы и спутниковую связь
Вся мощность от волн
Дистанционно управляемый надводный аппарат, использующий энергию волн, или волновой глайдер, представляет собой специальное устройство для преобразования энергии волн в энергию поступательного движения вперед за счет свободно поворачивающихся плавниковых движителей (крыльев). «Крылья» используют энергию набегающей волны и двигают подводную часть вперед, которая тянет за собой надводную часть.
Например, волновой глайдер Wave Glider от компании Boeing/Liquid Robotics имеет двухсекционную структуру. Похожая на доску для серфинга надводная часть с литий-ионными батареями и солнечными панелями связана с подводным рулевым модулем кабелем длиной 8 метров. Крылья (набор плоскостей) модуля, свободно вращающиеся вокруг горизонтальной оси, используя энергию волн, совершают колебательные движения и придают надводной части скорость порядка 2 км/ч. Кроме того, Wave Glider может использовать устройство Thrudder, представляющее собой комбинацию реактивного двигателя и руля, которое создает дополнительную управляемую тягу при очень небольшом волнении моря, как в экваториальной зоне затишья, так и при очень сильных течениях. При необходимости Thrudder добавляет примерно пол-узла к скорости глайдера Wave Glider.
Аппарат Seaglider погружается и начинает свою миссию. В сенсорный комплект входят профилограф-кислородомер Sea Bird и флуориметр-оптический рефлектометр обратного рассеяния WET Labs. Скорость взятия образцов может варьироваться в зависимости от сенсора и глубины
Происхождение поплавковых глайдеров
По словам Джеральда Диспейна из Университета Сан-Диего, активная разработка поплавковых глайдеров началась в начале 90-х годов, когда американское Управление морских исследований выделило на это средства. Он добавил, что эти платформы, например, глайдер Spray от Института океанографии Scripps, Seaglider от лаборатории прикладной физики университета Вашингтона, и глайдер Slocum, изначально разработанный океанографическим институтом в Вудс-Хоуле, могут развертываться вручную двумя людьми. За прошедшее десятилетие они стали обычными системами сбора данных для американских федеральных и местных организаций, например, Национального управления океанографических и атмосферных исследований, а также для нефтегазовой отрасли. В настоящее время они оборудуются самыми разными малоразмерными сенсорами и датчиками с небольшим энергопотреблением, а также небольшими компьютерами, работающими на независимых алгоритмах, которые могут принять независимое решения, основываясь на собранной бортовыми датчиками информации.
По словам представителя Управления военно-морской метеорологии и океанографии, основным морским применением поплавковых глайдеров является прежде всего океанография. Росту популярности подобных аппаратов за последнее десятилетие способствовал прогресс в системах передачи данных в реальном времени, миниатюризация и расширение ассортимента сенсоров и увеличение продолжительности выполнения задачи. Американские ВМС имеют в своем распоряжении самый крупный флот глайдеров в мире, более 100 аппаратов, большей частью производства компании Teledyne Marine.
Помимо мониторинга океана сенсорами типа СТD (солёность-температура-глубина), обеспечивающими работу гидроакустических станций (ГАС), Управление военно-морской метеорологии и океанографии ВМС США использует глайдеры для сбора данных об окружающей среде и совершенствования ее моделирования с целью лучшего понимания структуры океанов и обеспечения морских операций. Представитель Управления отметил: «Мы открыты для исследования любого использования глайдеров или бортовых сенсоров, которое могло бы помочь повышению качества выполнения задач». Глайдеры должны быть весьма энергоэффективными с тем, чтобы сохранять работоспособность длительное время, это относится и к движительным установкам и к бортовой аппаратуре. «Современные бортовые сенсоры потребляют очень мало энергии. Система водоизмещения, изменяющая плавучесть, являясь основным потребителем энергии в глайдере, ограничивает число погружений аппарата, которые он способен выполнить в одном выходе, - продолжил он. - Сенсорные системы для глайдеров Slocum, которые мы используем в военной океанографии, довольно эффективны. Подобная высокая эффективность в управлении энергопотреблением позволяет проводить анализ отобранных проб при существенно меньших затратах по сравнению с традиционными методиками забора с судна». Диспейн указал на то, что сниженное потребления глайдерами энергии является, по большому счету, следствием их медленности. Он отметил, что для любой мобильной платформы количество затрачиваемой на движение энергии в единицу времени увеличивается с кубом скорости с учетом среды, в которой эта платформа движется. Другими словами удвоение скорости подводного аппарата влечет за собой повышение энергопотребления в восемь раз. «Движение под водой глайдера столь эффективно, учитывая потребление энергии в единицу времени, потому, что он движется в этой среде довольно медленно».
Более релевантной мерой эффективности движителя является энергия, затраченная на единицу пройденного расстояния, количество которой напрямую зависит от гидродинамического коэффициента. «Концепция летающего крыла максимально повышает этот коэффициент, поэтому глайдеры, базирующиеся на ней, потребляют меньше энергии на пройденную горизонтально дистанцию, чем любые другие глайдер сравнимого размера, движущийся на сравнимой скорости». Новый тип глайдера, в котором используются эти принципы, был испытан в реальных условиях. Глайдер «летающее крыло» крупнее и быстрее предыдущих вариантов, он оптимизирован для больших дистанций и более продолжительных задач. «Его значительно более крупные размеры (размах крыла 6,1 метра) позволяют также повысить гидродинамическую эффективность, увеличить скорость, целевую нагрузку и полезную грузоподъемность».

Глайдер Seaglider, разработанный Лабораторией прикладной физики и ее Океанографической школой, имеет обтекаемую форму и хвостовые крылья, увеличивающие дальность плавания, в хвостовой части установлены спутниковая антенна и сенсор CTD
Накопление энергии
«Как и в случае с другими автономными подводными аппаратами, прогресс в области накопления и потребления энергии обещает увеличить продолжительность и дальность плавания и обеспечить больше энергии для бортовых сенсоров, хотя еще предстоит много работы прежде, чем они будут готовы к реальной эксплуатации», - заявил Дэн Радник, профессор из Калифорнийского Университет в Сан-Диего, разработавший глайдер Spray. - Конечно же, разрабатываются системы, использующие альтернативные источники энергии, например, температурные перепады океана и водоактивируемые батареи. Я бы не стал засекречивать уже развитые технологи». Диспейн в свою очередь привел пример твердых парафинов с изменяемым фазовым состоянием, которые успешно использовались для демонстрации способности платформ с изменяемой плавучестью в определенных условиях использовать для движения меняющуюся в зависимости от глубины температуру.
Он напомнил о совместной работе Scripps и Лаборатории реактивного движения по демонстрации работы погружного буя-измерителя, который плавал в море более года. В нем была реализована система с изменяемой плавучестью, приводимая в движение тепловым двигателем, технологию для которого была разработана основателем Webb Research (теперь часть Teledyne Marine) Дагом Веббом, когда он еще работал в Woods Hole. «Зрелость этой технологии может продемонстрировать доступность на рынке подобного глайдера с тепловым двигателем». Необходимо отметить один важный момент касательно материалов с фазовым переходом, которые извлекают энергию из перепадов температур, например, твердых парафинов, который состоит в том, что они уменьшаются в объеме при затвердевании и расширяются при расплавлении, а это неправильное направление для их прямого использования в качестве поплавкового движителя. «Двигатель должен увеличивать объем глайдера, когда он в своем цикле погружения идет вниз, и уменьшать его наверху. Поэтому тепловой глайдер должен иметь систему накопления энергии, которая могла бы обеспечить доступность энергии, извлеченной из фазового перехода, для следующего полуцикла. Например, эта энергия фазового перехода могла бы использоваться в качестве дополнительной при подзарядке бортовых аккумуляторов».
Радник пояснил, что в зависимости от набора датчиков на борту на движение, как правило, уходит от 60 до 70 процентов энергетического баланса глайдеров разработки Калифорнийского университета. «То есть наши датчики потребляют меньшее количество электричества (как правило, от 20 до 30 процентов), но зачастую они определяют продолжительность плавания, поскольку мы их меняем чаще, тогда как энергия для движения остается постоянной». Оставшиеся примерно 10 процентов идут на другие системы, в том числе компьютер, средства связи и навигации. В Университете ведется изучение путей аккумулирования в глайдерах большего количества энергии, включая самое простой способ. «Самой простой способ увеличения энергетической емкости - сделать глайдеры больше, что мы и изучаем. Другой путь - совершенствование аккумуляторов», - добавил профессор Радник.

Компоновочная схема глайдера Spray показывает размещение основных внутренних модулей. Два батарейных блока изменяют центр тяжести, а баллоны и насос в хвостовой части изменяют плавучесть
Противолодочная оборона
Интерес к глайдерам всегда был шире научной океанографии и, как отметил Диспейн, с началом их перехода в боевые флоты ожидается рост этого сегмента рынка. В ноябре 2016 года американский флот объявил о том, что готов развернуть глайдеры со своих эсминцев с целью дать флоту новые возможности. После проведения успешных испытаний в Тихом океане Командование военно-морских систем ВМС США одобрило комплектование эсминцев класса «Арли Бёрк» одним-двумя глайдерами. АПА обеспечат операторов ГАС на эсминцах данными в реальном времени. Данные, скорее всего, будут поступать с датчиков типа CTD и использоваться для обновления диаграмм «скорость звука-глубина» для калибровки ГАС на поверхности и на воздушных платформах.
В то время как их прямое использование для обнаружения подводных лодок, например, с помощью пассивных гидролокаторов, является очевидным, это не то, о чем флот говорит в открытую. Впрочем, там охотно обсуждают деятельность по обнаружению, отслеживанию и изучению других подводных сущностей. Как пояснил Диспейн, «Американский флот заинтересован в лучшем понимании распространения и поведения морских млекопитающих, исчезающих видов и другой морской жизни с целью минимизации последствий своей деятельности на океаническую среду». Это задача для новых, более крупных глайдеров с акустическими датчиками. Автономные глайдеры типа «летающее крыло» оборудуются многоэлементными гидроакустическими приёмными антеннами, устанавливаемыми вдоль передней кромки крыла, а также дополнительными подводными акустическими датчиками для того, чтобы тихо слушать и определять направление на источники звуков в океане. То есть эти глайдеры хорошо подходят для обнаружения, локализации и слежения за отдельными, издающими звуки животными».
При отслеживании одним глайдером отдельных морских млекопитающих необходимо, чтобы животное издавало звуки достаточно часто, то есть определенную последовательность звуков, которую можно было бы ассоциировать с ним. Только тогда глайдер сможет определить направление, с которого идет каждый крик, и составить маршрут движения искомого животного. «Если, например, двигательные установки с гребными винтами генерируют звук непрерывно, то некоторые виды морских млекопитающих зачастую не издают звуки настолько часто, чтобы можно было составить маршрут. Другие виды собираются в тесные группы и издают звуки так часто (например, группы дельфинов), что отслеживание отдельных особей в группе практически невозможно». Диспейн отметил, что глайдеры типа «летающее крыло» могут оказаться единственной платформой с достаточной грузоподъемностью, способной нести большие антенные решетки на борту. В качестве альтернативного варианта можно буксировать такую антенну, но здесь возникают дополнительные сложности. «Отслеживание популяций морских млекопитающих, издающих крики, может быть реализовано за счет распределенной в пространстве группы глайдеров, в которой каждый глайдер «слушает» и определяет наличие или отсутствие конкретных интересующих особей».
Задачи
Автоматические надводные аппараты, использующие энергию волн, например, Wave Glider, обеспечивают большую продолжительность работы, поскольку могут перезаряжать свои аккумуляторы от солнечных батарей и, так как он плавают на поверхности, то могут оставаться постоянно на связи и непрерывно получать обновляемые координаты со спутников глобальной навигационной системы Global Positioning System. Компания Liquid Robotics называет свой аппарат Wave Glider «трансформационный технологией, которая может помочь построить цифровой океан», подразумевая то, что он идеально подходит для работы в качестве коммуникационного шлюза от морского дна в космос, что позволит подводным аппаратам, включая поплавковые глайдеры, оборудованные акустическими модемами, поддерживать связь в любой точке Мирового океана без необходимости всплытия. Как отметили в компании, «Мы являемся частью более крупной системы систем, соединяющей обитаемые и необитаемые платформы. Эта важная инфраструктура необходима, чтобы помочь открыть 95 процентов океана, которые на данный момент не изучены, и помочь решить некоторые самые сложные мировые проблемы».
Глайдеры Wave Glider, как сообщили в компании, прошли в море более 1,1 миллиона морских миль (2,1 миллиона километров). Несмотря на то, что эти аппараты уже хорошо зарекомендовали себя, в компании активно занимаются их совершенствованием. Это касается мощности и энергоемкости, сенсорных комплектов и средств связи, долговечности и программного обеспечения, особый акцент делается на автономности. В компании Liquid Robotics утверждают, что Wave Glider может оставаться в море от нескольких месяцев до года в зависимости от выполняемой задачи. Ограничивающими факторами являются обрастание морскими организмами или ракушками самого аппарата и его датчиков, волнение моря и количество доступной солнечной энергии. Эти факторы во многом зависят от времени года, в котором развернут глайдер, его местоположения и типов сенсоров. Бурный рост ракушек летом в Мексиканском заливе, например, влияет на работу сенсоров до такой степени, что глайдеры необходимо регулярно очищать. Эту проблему операторы решают с помощью специальной жидкости, в которой заступающие на смену глайдеры моются; обросшие же глайдеры отправляются домой на чистку.
Противолодочная война, будь то ситуационная осведомленность или длительное наблюдение, состоит в основном из морских задач, что определяет установку основных метеорологических и акустических сенсоров. Как и другие разработчики АПА, компании Liquid Robotics и Boeing регулярно участвуют в учениях и боевых экспериментах, например, в эксперименте UNMANNED WARRIOR, который состоялся у берегов Великобритании осенью 2016 года, во время которого глайдеры Wave Glider продемонстрировали свои возможности в противолодочной борьбе - сбор и распределение данных геопространственной разведки.

По договору с CoMotion, инновационным центром Университета Вашингтона, компания Kongsberg разрабатывает Seaglider, глайдер для мелководья Oculus и вариант Seaglider М-6
Эти аппараты также приняли участие в нескольких упражнениях по развитию геопространственной разведки MASSMO (Marine Autonomous Systems in Support of Marine Observations), возглавляемых британским Национальным океанографическим центром. При выполнении упражнений MASSMO они собирали то, что компания описывает как ценная и последовательная информация о температуре воды, течениях и других явлениях в сложных морских условиях. «Мы также продемонстрировали то, как данные с нескольких Wave Glider могут интегрироваться в системы сторонних производителей, например, те, что предлагаются компанией Boeing для упрощения принятия оперативных решений».
Глядя в обозримое будущее, в Управлении военно-морской метеорологии и океанографии ВМС США ожидают, что основным направлением разработки должно стать дальнейшее увеличение продолжительности работы глайдеров и расширение номенклатуры сенсоров. «Собранная информация очень полезна для флота, эти данные помогают в построении моделей океана. Перспективы глайдеров на флоте очевидны, - сказал его представитель. - Я полагаю, что самым важным направлением станет упрощение работы с глайдерами, их доступность для неспециалистов, что важно для увеличения количества глайдеров на океанских просторах». Поплавковые и волновые автономные аппараты представляют собой молодую технологию с большим потенциалом для исследований. Технология, к которой подводники в будущем станут относиться весьма серьезно.
Использованы материалы:
www.shephardmedia.com
www.liquid-robotics.com
stories.kongsberg.com
robotrends.ru
www.whoi.edu
simrad.com
www.marinebuzz.com
www.wikipedia.org
ru.wikipedia.org


